









天津大学穿插研讨又出新效果!软体机器人每秒翻滚07倍身长100%自重负载
时间: 2024-09-28 来源:产品中心
近期,天津大学化工学院张雷教授课题组、机械学院陈焱教授课题组经过穿插学科的协作,使用琼脂糖薄膜的湿度灵敏特性,研讨出了一种可以在稳定湿度环境下快速翻滚的软体机器人——Hydrollbot,直线 BL/s,将稳定湿度驱动的机器人速度提高了两个数量级,高于已报导的变湿度呼应机器人,一起能负载本身分量的100%,而且完成了运动轨道的编程规划,相关研讨效果以“A Humidity-powered Soft Robot with Fast Rolling Locomotion”为题在线宣布在Research上 。
由环境驱动的软体机器人可以对环境中的光、热、化学物质、磁场、湿度等影响做出必定的反响,完成特定运动与功用,是机器人范畴的研讨热门之一。现在此类软体机器人规划中一个重要应战是在如安在高度集成机器人本体结构、执行器和动力的一起,在无人为干涉的稳定外界环境中完成快速运动和可编程的运动轨道。针对这一问题,本项作业根据湿度灵敏的琼脂糖薄膜资料,经过机器人结构规划克服了薄膜各向同性和随机曲折的问题,研讨出了一种可以在稳定湿度条件下接连快速运动的软体机器人Hydrollbot,并完成了运动轨道的可编程规划。
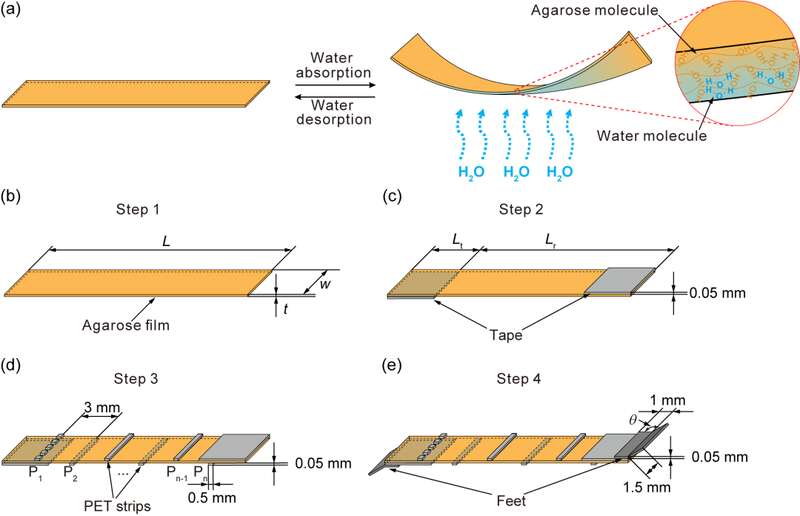
作者首要对机器人的结构进行规划(图1)。经过在薄膜两边张贴PET条带克服了薄膜的随机曲折问题,完成了单向曲折,并经过薄膜两头的V形PET脚添加了机器人与基底外表的摩擦力,一起避免了机器人反向运动。
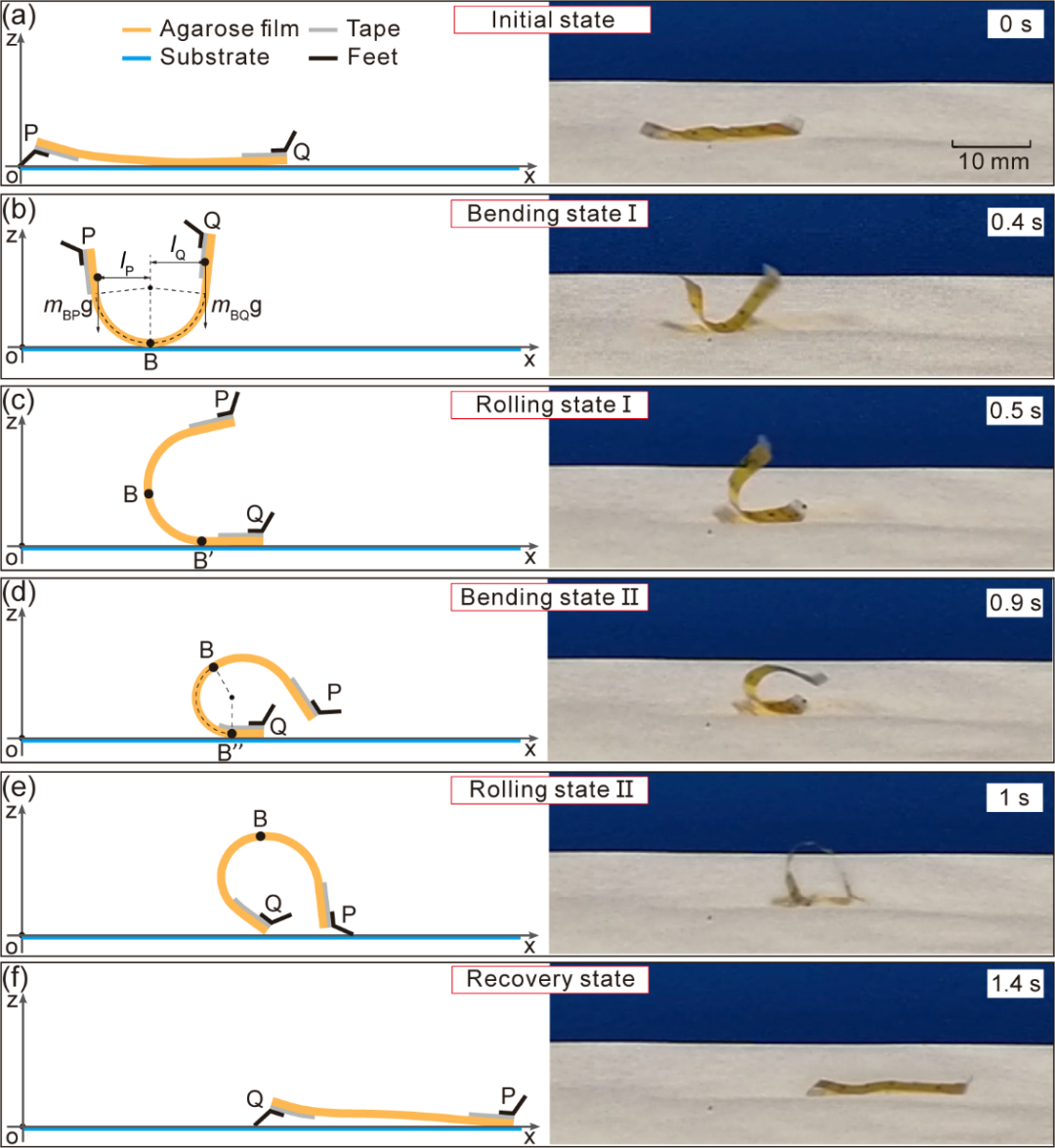
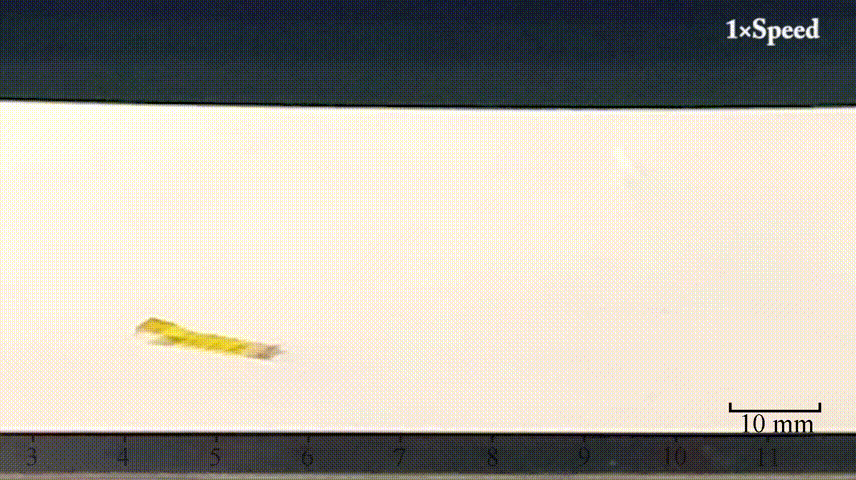
机器人与湿度环境触摸后,在吸水发生的曲折变形以及其本身的重力一起效果下,完成了在稳定湿度环境下接连的快速翻滚(图2)。
进一步,作者建立了机器人运动的理论剖析模型(图3),发现了机器人运动速度跟着薄膜长度和湿度的添加而添加,而跟着薄膜厚度和胶带长度的添加而下降。
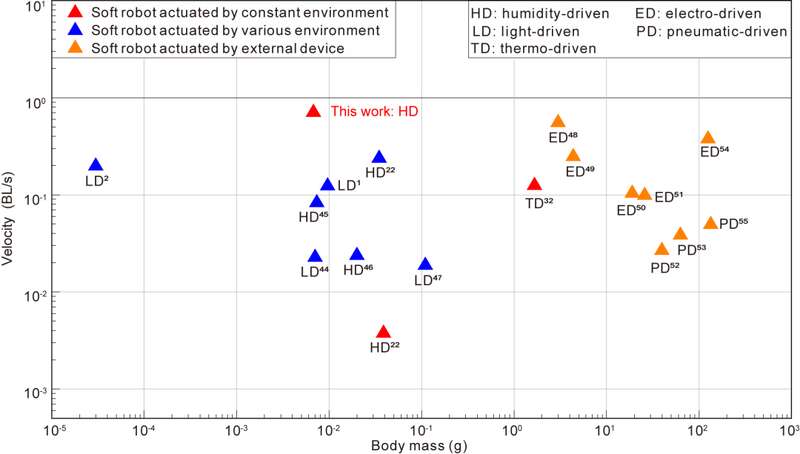
根据理论模型优化后的机器人的分量仅为6.8 mg,而直线 BL/s,超越现在报导的一切湿度呼应软体机器人(图4),并领先于现在大多数环境驱动的软体机器人。此外,Hydrollbot还可以带着本身分量100%的有效载荷运动(图5)。
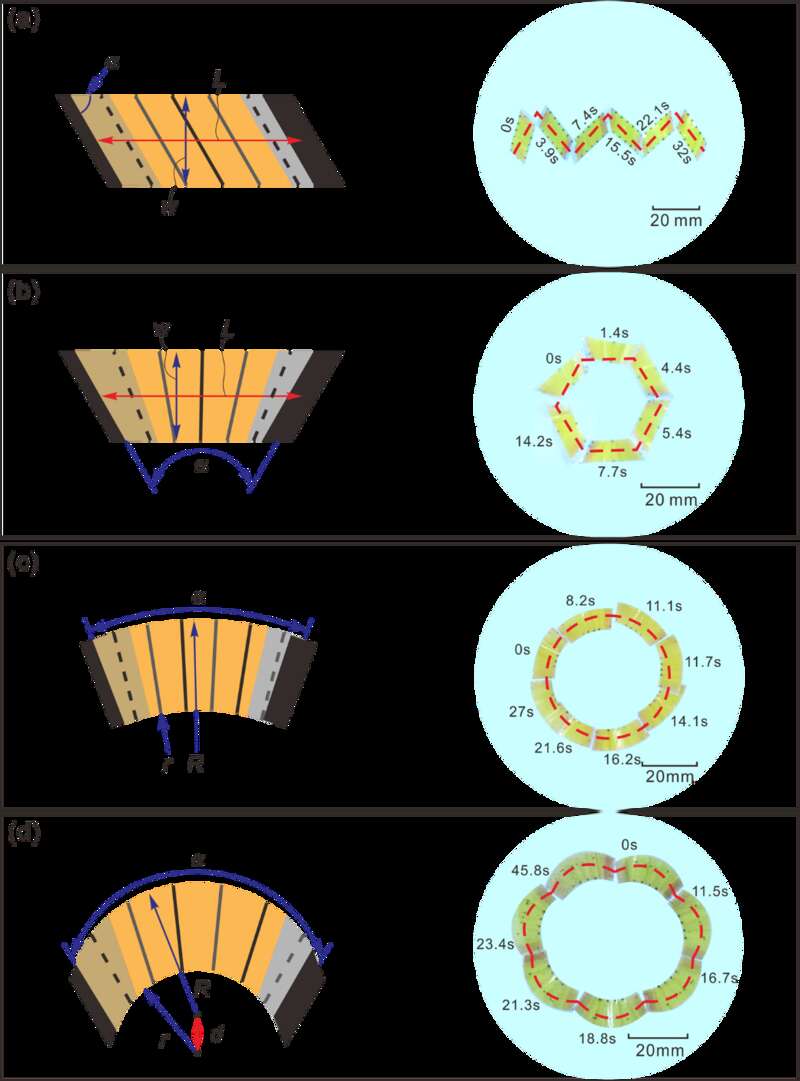
最终,作者经过改动Hydrollbot机器人结构的几许形状和脚的方位调控机器人的翻滚方向,经过调整PET条带的相对方位操控薄膜的曲折方向,完成了运动轨道的多种简略编程(图6)。
此项作业为环境驱动软体机器人的结构规划供给了多学科穿插研讨的新思路,有望推进湿度驱动软体机器人在医疗、传感、驱动等方面的使用。未来的研讨将经过立异结构规划与多种影响灵敏的新资料相结合,完成机器人在杂乱环境下的适应性、智能性与可靠性。

张雷教授现任天津大学化工学院生物化工系教授,国家自然科学基金优秀青年基金获得者。首要研讨方向包含生物化工与组成生物学、低温维护、功用资料、海洋涂料等。在包含Nature Biotechnology, Nature Communications, JACS, AIChE Journal,CES等期刊宣布论文100多篇。

陈焱教授现任天津大学机械工程学院教授,国家自然科学基金杰出青年基金获得者。首要研讨方向包含组织运动学、折展结构、超资料等的基础理论及其在航空航天结构、机器人、医疗微结构中的工程使用。代表性论文宣布在Science、PNAS等尖端期刊上。
- 上一篇: 江门水文分局大力推动新仪器新设备投入运用
- 下一篇: 新疆开采及落煤装煤运煤的粉尘报警器